Matrix Rotation
Beschreibungen zur Rotation von Matrizen
Eine Polar Koordinate kann durch ein Zahlenpaar \( (x, y)\) beschrieben werden. Die Zahlen sind die Entfernung von der y-Achse und von der x-Achse im Koordinatensystem. Alle Koordinaten links von der y-Achse haben eine negative x-Koordinate. Alle Punkte unterhalb der x-Achse haben eine negative y-Koordinate.
Statt mit dem Ausdruck \((x, y)\), können wir den Punkt mit dem Radius \(r\) und dem Winke \(θ\) als \((r, θ)\) beschreiben.
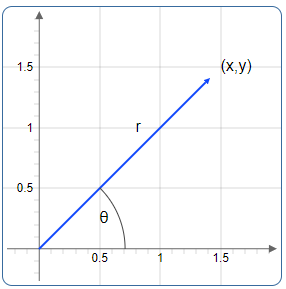

Im Diagramm oben, ist \(r\) die Hypotenuse eines rechtwinkligen Dreiecks.
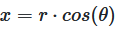
Die x-Position kann nach der folgenden Formel aus dem Radius \(r\) und dem Winkel \(θ\) berechnet werden.
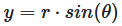
Die y-Position errechnet sich dem entsprechend aus der Formel
In der folgenden Abbildung haben wir den Punkt (x, y) um den Winkel \(φ\). gedreht. Wir haben jetzt



In einer Matrixform geschrieben sieht es so aus:

Das Beispiel unten zeigt eine Matrix welche den Vektor um einen Winkel von \(φ = 30°\) dreht.

Mit dieser Matrix wird der Positionsvektor für den Punkt \((1,0)\) festgelegt.

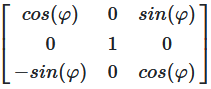
Eine Drehung im 3-Raum, gegen den Uhrzeigersinn, zeigen die folgenden Matrizen
Drehung um die X-Achse

Drehung um die Y-Achse
Drehung um die Z-Achse

|
|