Matrices rotation
Description of matrices and geometric rotation with examples
A polar coordinate can be described by a pair of numbers\( (x, y)\). The numbers are the distance from the y axis (x), and from the x axis (y) in the coordinate system. Any points to the left of the y-axis will have a negative x coordinate. Any points below the x axis, will have a negative y coordinate.
Instead with the term \((x, y)\) , we can describe the point with radius \(r\) and the angle \(θ\) as \((r, θ)\).
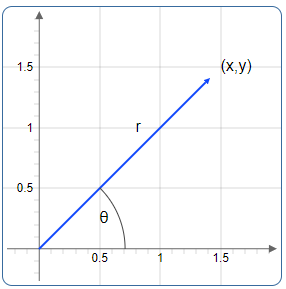

In the diagram above, \(r\) is the hypotenuse of a right-angled triangle.
The x-position can be calculated from the radius \(r\) and the angle \(θ\) according to the following formula.
The y-position is calculated accordingly from the formula
In the following figure, we have rotated the point (x, y) by the angle \(φ\). So, we have now



When we write this in a matrix form it looks like this

The example below shows a matrix that rotates the vector by an angle of \(φ = 30°\).

With this Matrix the position vector for the point \((1,0)\) becomes

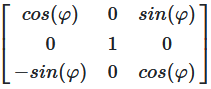
A rotation in 3-space, counter clockwise shows the matrices below
About the x-axis

About the y-axis
About the z-axis

|
|