Math Software with fullscreen editor
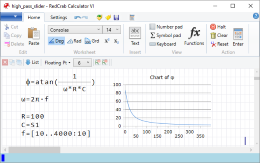
RedCrab Calculator is a mathematics software with fullscreen editor for the free placement of algebraic formulas on the worksheet in mathematical notation.
Results can be displayed in different numeric formats and in diagrams. Images and texts can be inserted.
RedCrab worksheets are also suitable for presentations.
RedCrab Calculator is Freeware.

 The RedCrab Calculator is portable. No installation is required.
RedCrab starts from external disk, e.g. USB flash drive.
Program settings are stored in the start directory.
The RedCrab Calculator is portable. No installation is required.
RedCrab starts from external disk, e.g. USB flash drive.
Program settings are stored in the start directory.
The RedCrab Calculator User's Guide can be found here.
It contains descriptions for handling and more than 250 math functions.
The online help for the individual functions can be called up directly from the program with a mouse click or with the F1 key